Note
Go to the end to download the full example code.
Farthest Point Sampling#
Subsample a point cloud so the kept points stay spaced apart instead of clumping in dense regions.
Farthest point sampling (FPS) starts from a random seed and repeatedly picks the point that is farthest from the current sample set. Compared to a uniform random draw, it gives a much more even covering of the input cloud.
References#
Y. Eldar et al., “The farthest point strategy for progressive image sampling,” Proc. 12th IAPR Int. Conf. on Pattern Recognition, Vol. 2, 1994, pp. 93-97, doi:10.1109/ICPR.1994.577129.
import numpy as np
import pyvista as pv
from pyvista import examples
Load a point cloud#
download_horse_points() returns a scanned
horse with uneven point density.
Implement farthest point sampling#
Each iteration tracks the distance from every input point to its closest already-sampled neighbor and picks the point with the largest such distance as the next sample.
rng = np.random.default_rng(seed=0)
def farthest_point_sampling(points, n_samples):
"""Return indices of ``n_samples`` farthest-spaced points."""
sampled = np.empty(n_samples, dtype=int)
sampled[0] = rng.integers(points.shape[0])
distances = np.full(points.shape[0], np.inf)
for i in range(1, n_samples):
last = points[sampled[i - 1]]
distances = np.minimum(distances, np.linalg.norm(points - last, axis=1))
sampled[i] = np.argmax(distances)
return sampled
n_samples = 400
fps_ids = farthest_point_sampling(cloud.points, n_samples)
random_ids = rng.choice(cloud.n_points, size=n_samples, replace=False)
fps_cloud = pv.PolyData(cloud.points[fps_ids])
random_cloud = pv.PolyData(cloud.points[random_ids])
Compare with a uniform random draw#
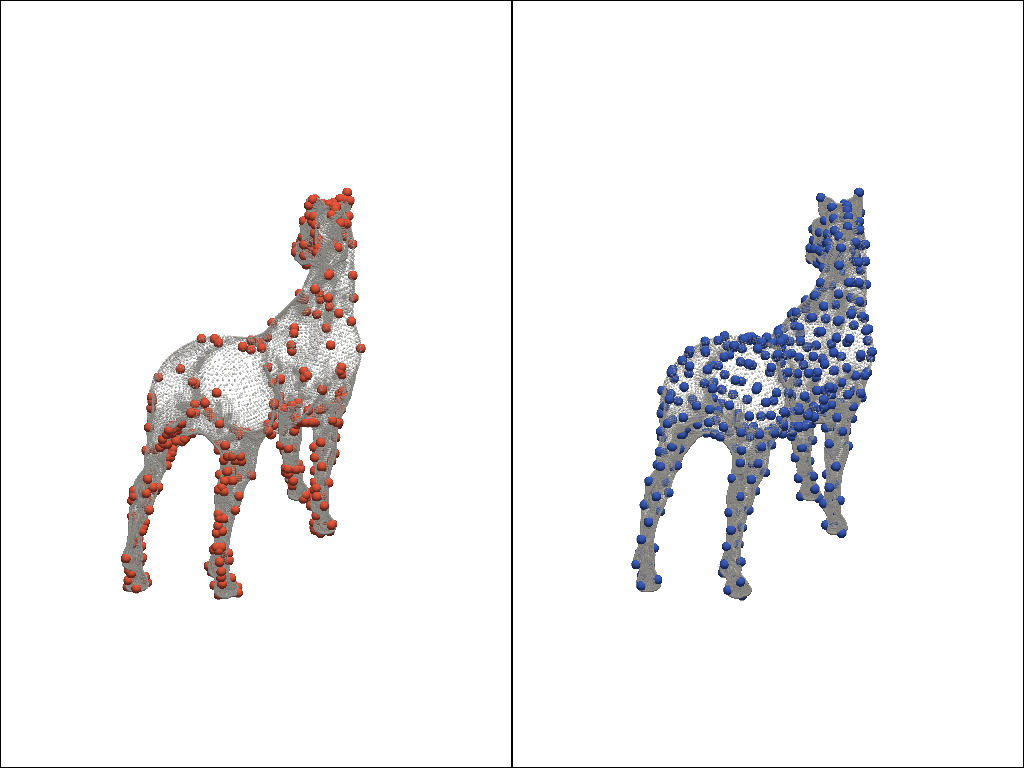
The random subsample (left, red) leaves visible gaps and clumps. The farthest-point subsample (right, blue) lays the points down in a more uniform pattern over the surface.
cpos = pv.CameraPosition(
position=(0.4, -0.5, 0.25),
focal_point=cloud.center,
viewup=(0, 0, 1),
)
pl = pv.Plotter(shape=(1, 2))
pl.subplot(0, 0)
pl.add_points(
cloud,
color='lightgray',
point_size=2,
render_points_as_spheres=True,
opacity=0.4,
)
pl.add_points(
random_cloud,
color='tomato',
point_size=10,
render_points_as_spheres=True,
)
pl.camera_position = cpos
pl.subplot(0, 1)
pl.add_points(
cloud,
color='lightgray',
point_size=2,
render_points_as_spheres=True,
opacity=0.4,
)
pl.add_points(
fps_cloud,
color='royalblue',
point_size=10,
render_points_as_spheres=True,
)
pl.camera_position = cpos
pl.link_views()
pl.show()
Quantify the coverage gap#
For each input point, find the distance to its closest sample and report the worst case. Lower is better.
random_max_gap = max(
np.linalg.norm(p - random_cloud.points[random_cloud.find_closest_point(p)])
for p in cloud.points
)
fps_max_gap = max(
np.linalg.norm(p - fps_cloud.points[fps_cloud.find_closest_point(p)])
for p in cloud.points
)
random_max_gap, fps_max_gap
(np.float32(0.025225757), np.float32(0.0072706863))
Total running time of the script: (0 minutes 12.527 seconds)