Note
Go to the end to download the full example code.
Wrap a Point Cloud in a Convex Hull#
Create a convex hull from a point cloud using tetrahedralization and surface extraction.
import numpy as np
import pyvista as pv
from pyvista import examples
Load a point cloud#
The download_horse_points() dataset is a
dense scan of a horse statue. Subsample it to keep the hull geometry light.
full_cloud = examples.download_horse_points()
rng = np.random.default_rng(seed=2)
sample_ids = rng.choice(full_cloud.n_points, size=4000, replace=False)
cloud = pv.PolyData(full_cloud.points[sample_ids])
cloud
Extract the outer hull#
A Delaunay tetrahedralization followed by surface extraction returns the outer surface of the cloud.
hull = cloud.delaunay_3d(alpha=cloud.length).extract_surface(algorithm=None)
pl = pv.Plotter()
pl.add_points(
cloud,
color='black',
point_size=6,
render_points_as_spheres=True,
)
pl.add_mesh(hull, color='royalblue', opacity=0.4, show_edges=True)
pl.camera_position = pv.CameraPosition(
position=(0.4, -0.5, 0.25),
focal_point=cloud.center,
viewup=(0, 0, 1),
)
pl.show()
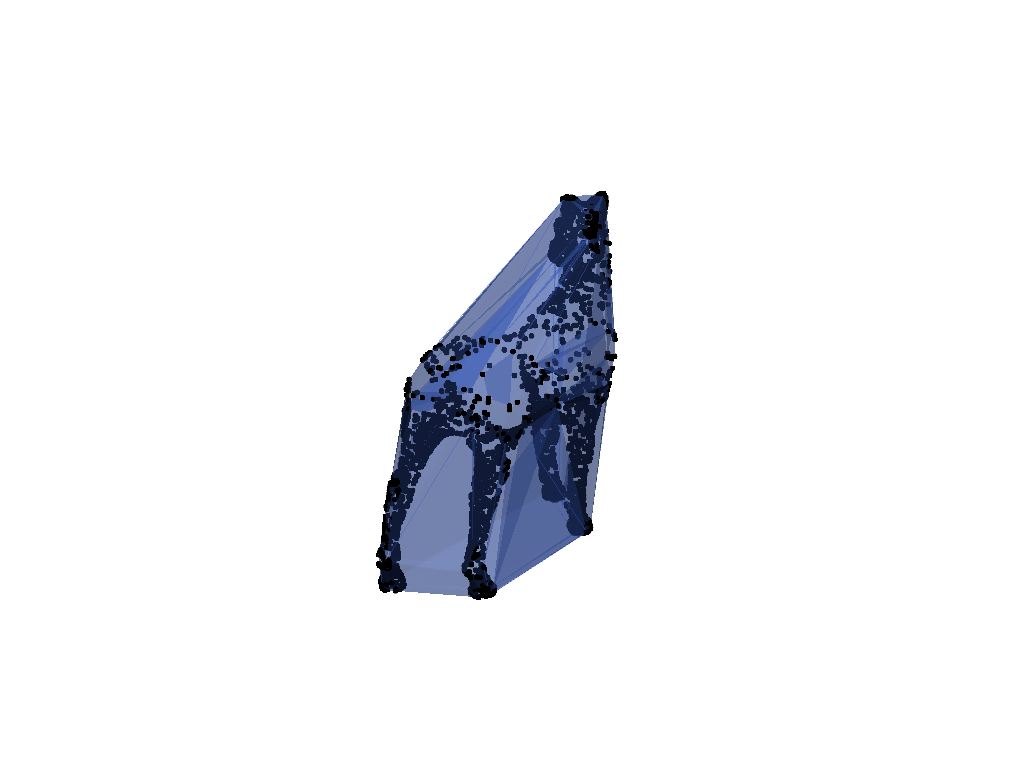
Inspect the wrapped surface#
The result is a closed surface enclosing every input point.
Total running time of the script: (0 minutes 0.418 seconds)