Note
Go to the end to download the full example code.
Extract Edges#
Extract edges from a surface.
from __future__ import annotations
import pyvista as pv
from pyvista import examples
From vtk documentation, the edges of a mesh are one of the following:
boundary (used by one polygon) or a line cell
non-manifold (used by three or more polygons)
feature edges (edges used by two triangles and whose dihedral angle > feature_angle)
manifold edges (edges used by exactly two polygons).
The extract_feature_edges()
filter will extract those edges given a feature angle and return a dataset
with lines that represent the edges of the original mesh.
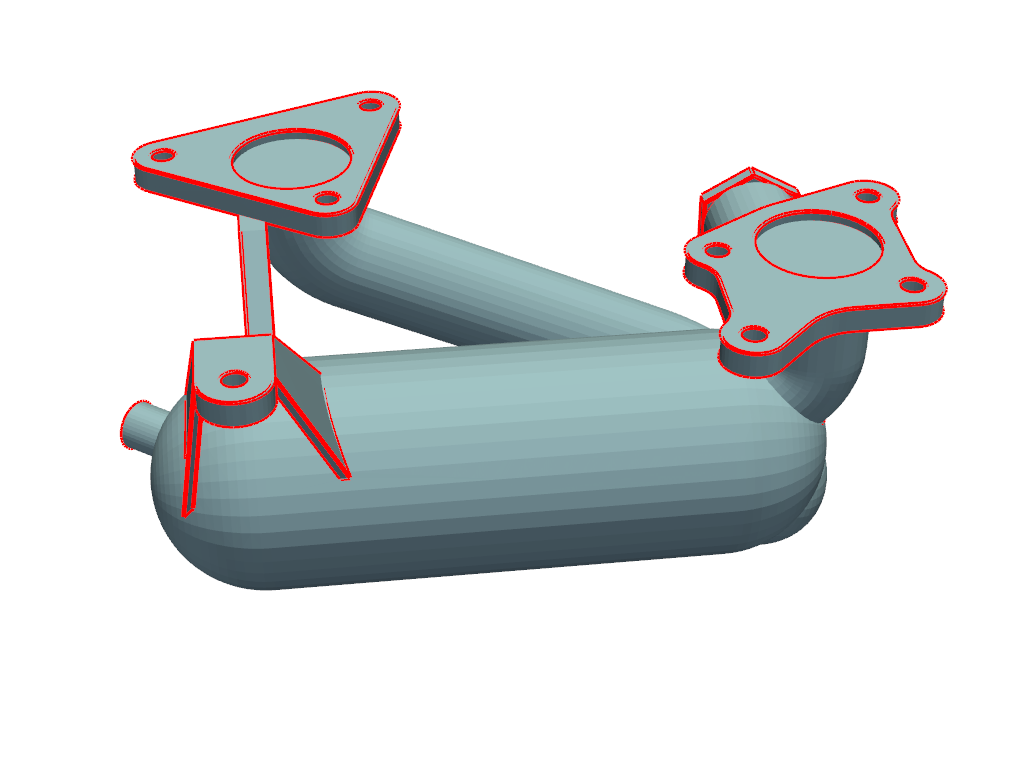
To demonstrate, we will first extract the edges around a sample CAD model:
# Download the example CAD model and extract all feature edges above 45 degrees
mesh = examples.download_cad_model()
edges = mesh.extract_feature_edges(45)
# Render the edge lines on top of the original mesh. Zoom in to provide a better figure.
p = pv.Plotter()
p.add_mesh(mesh, color=True)
p.add_mesh(edges, color='red', line_width=5)
p.camera.zoom(1.5)
p.show()
We can do this analysis for any pyvista.PolyData object. Let’s try
the cow mesh example:
mesh = examples.download_cow()
edges = mesh.extract_feature_edges(20)
p = pv.Plotter()
p.add_mesh(mesh, color=True)
p.add_mesh(edges, color='red', line_width=5)
p.camera_position = [(9.5, 3.0, 5.5), (2.5, 1, 0), (0, 1, 0)]
p.show()

We can leverage the pyvista.PolyData.n_open_edges property and
pyvista.DataSetFilters.extract_feature_edges() filter to count and
extract the open edges on a pyvista.PolyData mesh.
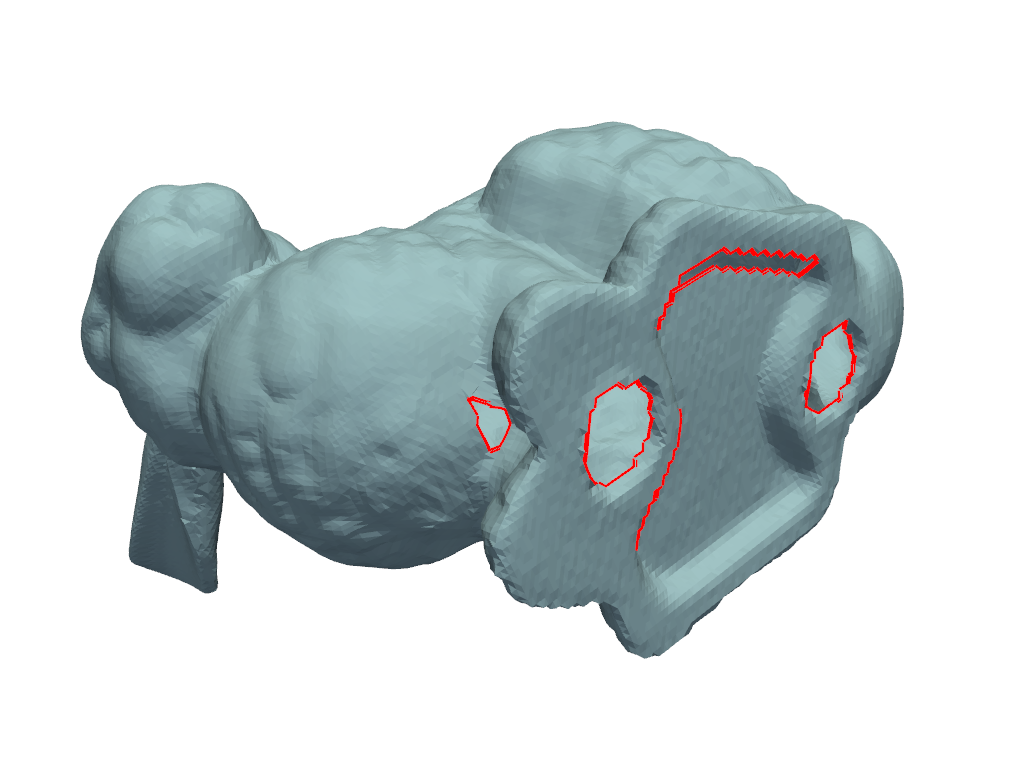
# Download a sample surface mesh with visible open edges
mesh = examples.download_bunny()
mesh
We can get a count of the open edges with:
mesh.n_open_edges
223
And we can extract those edges with the boundary_edges option of
pyvista.DataSetFilters.extract_feature_edges():
edges = mesh.extract_feature_edges(boundary_edges=True, feature_edges=False, manifold_edges=False)
p = pv.Plotter()
p.add_mesh(mesh, color=True)
p.add_mesh(edges, color='red', line_width=5)
p.camera_position = [(-0.2, -0.13, 0.12), (-0.015, 0.10, -0.0), (0.28, 0.26, 0.9)]
p.show()
Total running time of the script: (0 minutes 1.624 seconds)